著者:
Christy White
作成日:
4 5月 2021
更新日:
4 5月 2024

コンテンツ
レゴマインドストームNXTロボットは素晴らしいおもちゃであり、プログラミング方法を学ぶためのさらに優れた方法です。ロボットに付属するプログラムはシンプルで直感的に使用でき、ロボットを使用してあらゆることを実行できます。レゴのピースを使用してロボットを構築したら、次は、タスクまたはタスクの組み合わせを実行するようにロボットをプログラミングします。学ぶために読んでください。
手順
5のパート1:はじめに
プログラムをインストールして開きます。 ロボットには、MacとWindowsの両方に含まれるプログラムが付属している必要があります。または、Lego MindstormのWebサイトからダウンロードできます。ディスクを挿入するか、ダウンロードを開くと、インストールウィンドウが表示されます。指示に従ってプログラムをインストールしてから開きます。
プログラムをナビゲートする方法を学びます。 上部のツールバーを使用して、プログラムを保存するか、既存のプログラムを開くか、新しいプログラムを作成します。黒い矢印のような形をした「ポインタ」ツールを使用して、操作を挿入、移動、削除します。小さな白い手のように見える「パン」ツールを使用すると、プログラムウィンドウをウィンドウ内にドラッグしてナビゲートできます。吹き出しの形をしたコメントツールを使用すると、プログラムの一部にテキストを入力できるため、コメントを追加して、他の人がプログラムを理解しやすくなるようにコメントを追加できます。- ウィンドウの右側のRobo Centerには、構築およびプログラミングできるいくつかの異なるロボットからのチュートリアルと指示が含まれています。 Roboセンターの上部にあるもう1つのタブでポータルが開き、プログラミングに役立つオンラインリソースにアクセスできます。
- オペレーションの上にマウスを置くと、右下隅にこのオペレーションの説明が表示され、ウィンドウの下部でそのオペレーションの設定を変更できます。
さまざまな操作にアクセスする方法を学びます。 左側のタスクバーには、ロボットが実行できるすべての操作が含まれています。バーの下部にある3つのタブから、これらの操作のさまざまなセットにアクセスできます。それを探索して、ロボットが持つ可能性のあるさまざまなタスクを発見して体験してください。- 緑色の丸が付いた左端のタブには、移動(モーション)、サウンド(サウンド)、ループ(繰り返し)、スイッチなどの最も一般的な操作が含まれています。このレイアウトでは、最も頻繁に使用する操作にすばやくアクセスできますが、残りの操作にはアクセスできません。
- 中央のタブには3つの色付きの四角があり、含まれるすべての操作がカテゴリに分けて含まれています。上部の緑色の円の上にマウスを置くと、サウンドの再生や色付きのライトのアクティブ化などの一般的な操作やアクションにアクセスできます。他のボタンを調べて、すべての操作を見つけます。
- 等号の付いた最後のタブには、インターネットから作成またはダウンロードした操作がカスタマイズされています。
チュートリアルから始めます。 プログラムには、最初のプログラムをガイドするいくつかのチュートリアルが含まれています。右側のロボセンターに移動し、作成するプログラムカテゴリをクリックします。最初のプログラムでは、Shooterbot in Vehiclesから始めることを検討してください。このチュートリアルはシンプルですが、利用可能な基本的なコントロール、および一般的なコーディングとテストの実践を紹介します。
チュートリアルの指示に従って、操作をプログラムにドラッグします。 必要に応じて設定を変更し、各操作が目的どおりに実行されるようにします。さまざまな操作を順番に配置して結合し、プログラムを通過する電流で接続します。操作をループ内に置くか、これらの操作をその制御ステートメントに含めるように切り替えます。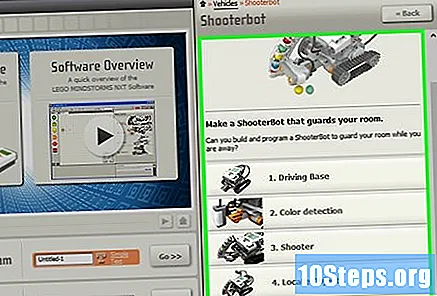
プログラムが完成したら、ロボットのインテリジェントブロックにダウンロードします。 USBケーブルを使用してブリックをコンピューターに接続します。プログラムウィンドウの右下隅にある正方形のボタンを使用すると、接続されているNXTデバイスと通信できます。これらのボタンの左下は、プログラムをデバイスにダウンロードします。ダウンロードが完了したら、インテリジェントブリックを取り外し、ロボットに挿入してプログラムを起動し、実行されるかどうかを確認します。
パート2/5:ロボットの制御
移動操作でロボットを移動します。 この操作には2つのギアがあります。プログラムに追加し、設定を調整します。タイヤに接続されたドアを使用してロボットを動かします。ホイールをポートBおよびCに接続した場合は、ポートBおよびCに対して移動操作が構成されていることを確認してください。
- 方向を定義して、前進、後退、または完全に停止します。方向コントロールを使用して回転します。
- 一定の回転数、一定の時間、または度数だけ前進します。または、期間を「無制限」に設定して、プログラムの後半で停止するコマンドを受け取るまでロボットが前進するようにします。
Engineコマンドを使用した撮影など、その他の操作を実行します。 Shooterbotチュートリアルでは、狙撃兵がポートAに接続します。これを制御するには、ポートAをアクティブにするモーター操作(単一のギアとして示されます)を使用します。方向(前進(前進)、後退、または停止(パラド))、アクション、筋力レベル、および運動の持続時間。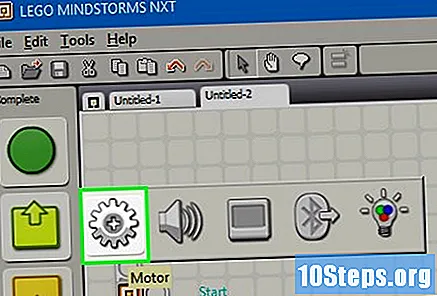
- 「完了を待つ」の選択を解除すると、ロボットは、モーターの動作によって制御される動作を完了する前に、プログラム内の次のコマンドの実行を開始できます。これにより、たとえば、ロボットが歩行と発射を同時に行うことができます。
- モーターコマンドは、制御するモーターによって実行されるすべての操作を実行します。エンジンがトレイを上げたり、ボールを投げたり、ロボットを回転させたり、他のことをしたりするようにロボットを構築します。このコマンドにより、ロボットのパフォーマンスに創造性と柔軟性がもたらされます。それを利用してください。
センサーを使用して、ロボットが環境と相互作用できるようにします。 スマートチップポートに超音波、タッチ、カラーセンサーを配置し、それらを使用して、光、色、音、タッチを感じます。ロボットは時間を追跡し、その回転を知ることもできます。これらのセンサーにより、プログラムはアクティブ化された場合にのみアクションを実行できます。たとえば、赤に遭遇したときに「赤」と発声し、青に遭遇したときに発言しないプログラムを作成できます。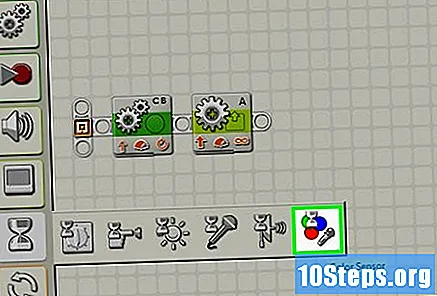
操作アクションを使用して、ロボットに物事を実行させます。 これらには、カラーライトのオン/オフ、ファイルからのサウンドの再生、インテリジェントブリック画面での画像またはテキストの表示、またはBluetoothを介したメッセージの送信が含まれます。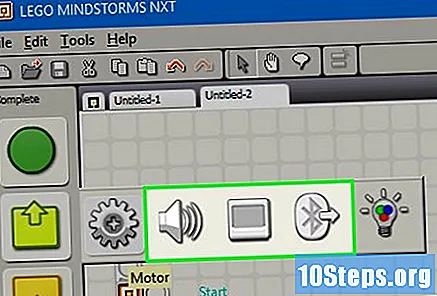
パート5/5:ループとスイッチの使用
ループの仕組みを理解する。 特定の条件が真である限り、または特定のアクションが発生するまで、一連のコマンドを繰り返し、無期限に、または指定された回数だけ実行できます。
- たとえば、黄色のボールが見つかるまでロボットにいくつかのボールを検査させるには、カラーセンサーによって制御されるループを作成するだけです。ループ内のアクションは、次のケーキを調べる責任があります。ループの制御は、カラーセンサーが黄色を検出しないことです。したがって、ボールを検査した後、カラーセンサーが黄色を検出すると、新しいボールの検査を停止し、プログラムの次の部分に進みます。
スイッチの仕組みを理解する。 スイッチは、特定の条件がtrueの場合は一連のコマンドを実行し、trueでない場合は異なるアクションのセットを実行するようにロボットに指示します。これらの2つの一連のアクションは、スイッチでは相互に排他的です。ロボットは一方を実行しますが、もう一方は実行しません。
- 1つのスイッチを他のスイッチの中に入れ子にして、アクションを実行する前にさまざまな条件を確認します。たとえば、光や音が検出されない場合は、ネストされたスイッチを使用してロボットを前進させます。最初のスイッチは光を探します。何も検出されない場合、ロボットは2番目のスイッチに入り、音を探します。ロボットが音を検出しない場合(光を検出しない場合)のみ、ロボットは前進します。
- 値制御スイッチに複数のケースを含めるには、スイッチ設定の[フラットビュー]オプションの選択を解除し、条件がリストされている設定の右側で、[+]を押して別のケースを追加します。これは、2つ以上の異なる値を持つことができる数値またはテキストメッセージを制御するときに役立ちます。
プログラムにループまたはスイッチをドロップして、コントロールを選択します。 これは、スイッチまたはループ内でコマンドを作成する前にロボットが検索する条件を定義します。コントロールは通常センサーです。これにより、ロボットは環境に近づくことができます。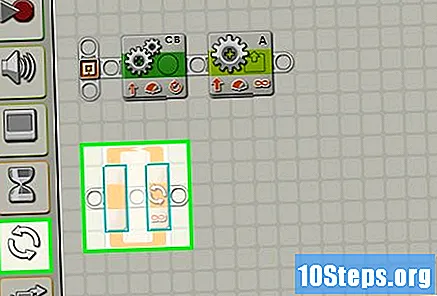
- スイッチは値で制御することもできます。データケーブルを使用して、スイッチのターゲットフィールドに変数を追加します。数字やテキストのさまざまな値のケースを追加します。たとえば、ロボットは、変数番号が0の場合は一連のコマンドを実行し、1の場合は他のコマンドを実行し、それ以外の数の場合はさらに他のコマンドを実行できます。
- ループは時間で制御することもできます-ループ内のステートメントは指定された時間またはカウントで実行されます。ロボットがこれらのタスクを無期限に実行できるように、特定の条件がtrueまたはfalse、またはForeverになるまでループを実行するには、[ロジック]を選択します。
他のコマンドをループまたはスイッチにドラッグします。 ループ内に置いた操作は、ループが実行されるたびに実行されます。ケースの条件が満たされた場合、スイッチの各ケースに配置する操作が実行されます。これらの操作を通常どおりに配置および構成します。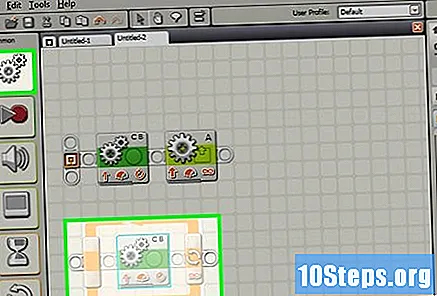
- 必要に応じて、ループやスイッチを他のループやスイッチの中に含めることができます。
パート4/5:変数の使用
変数の使用を理解します。 変数は情報を格納できるため、プログラムで後でアクセスできます。それらは、特定の情報を配置するボックスと考えてください。その後、ボックス(変数)自体を変更せずに、この情報を削除または変更できます。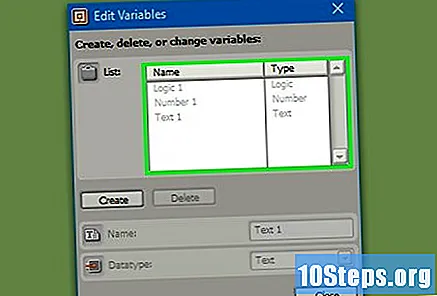
- 各変数には、数値、テキスト、または論理値(trueまたはfalse)を格納できます。変数の値は自由に変更できますが、その型は変更できません。
- 各変数には一意の名前があります。この名前を使用して、この変数にアクセスして参照します。
[編集]> [変数の定義]に移動して変数を作成します。 表示されるウィンドウで、変数の名前を入力し、目的のデータ型(ロジック、数値、またはテキスト)を選択します。不要になった変数を削除することもできます。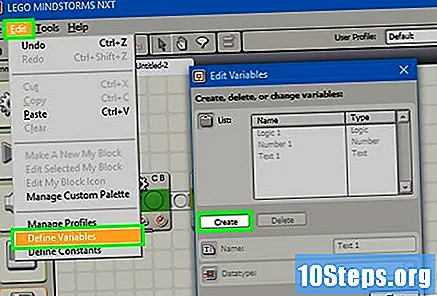
- 変数にわかりやすい名前を付けて、それらが誰であるかがわかるようにします。ロボットが送信するウェルカムメッセージを変数に格納する場合は、「text_var_1」の代わりに変数「greetings」を呼び出すか、あいまいなものを呼び出します。
プログラムで変数を使用するには、データケーブルを使用してコマンドに変数を接続します。 それらを数学演算に接続して、変数を組み合わせるか、結果を保存します。それらをループまたはスイッチに接続して、それらをコントロールとして使用し、ループまたはスイッチ内で変更することもできます。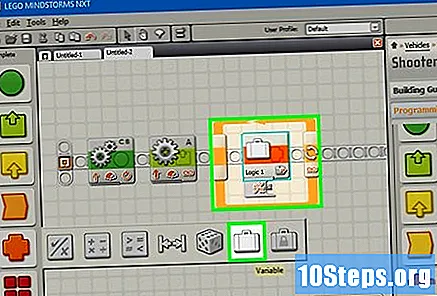
変化しない変数には定数を使用します。 ロボット名のテキスト定数が必要な場合は、編集>定数の定義に移動して、最初にそれを定義します。その後、値が変化するかどうかを心配することなく、この定数を使用できます。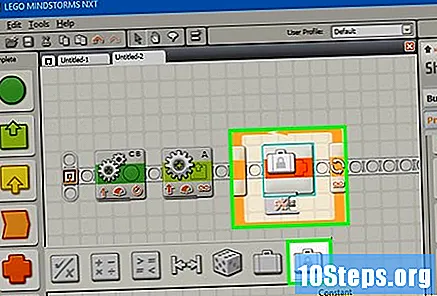
パート5/5:カスタムブロックの使用
カスタムブロックの方法を理解します。 プログラム中に数回繰り返す一連の1つ以上の操作のカスタムブロックを作成します。たとえば、ロボットを3秒間前進させて赤いライトを点滅させる場合は、これらの指示をカスタムブロックに含めて、プログラムに含める必要があるときにいつでも簡単にアクセスできるようにします。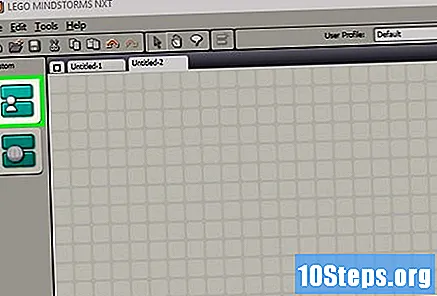
カスタムブロックになるさまざまな操作を配置します。 通常どおり、プログラムに含めます。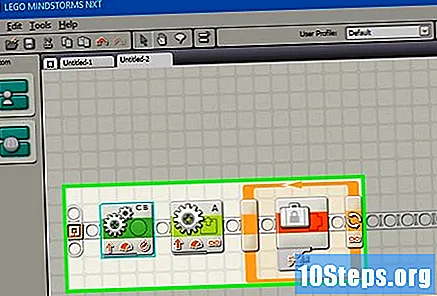
カスタムブロックに変換する命令を選択します。 Shiftキーを押しながら、各操作をクリックします。すべてを選択したら、コメントツールの横にある上部のツールバーの等号をクリックします。これにより、「My Block Builder」というウィンドウが開きます。 [編集]> [新しいブロックを作成]に移動して、カスタムブロックビルダーを開くこともできます。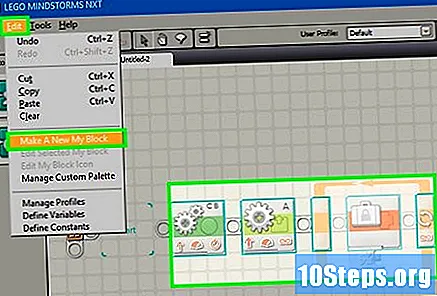
- カスタムブロック用に選択したブロックに出入りするデータケーブルがある場合、それらはブロックのポートとして表示され、プログラムでブロックを使用するときに変数またはその他のデータに接続できます。
カスタムブロックの名前と説明を入力します。 名前は短く、わかりやすいものにする必要があります。これにより、ブロックの機能を正確に覚えることができます。説明は明確で詳細である必要があり、ロボットが見ている方向や、ブロックが正しく機能するためにポートAに何を接続する必要があるかなど、すべての重要な注意事項が含まれている必要があります。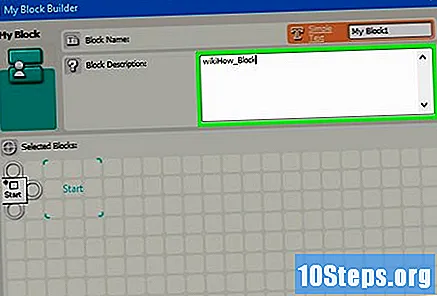
[次へ]をクリックして、アイコンエディタに移動します。 必要なアイコンをブロックのアイコンにドラッグします。アイコンの作成が完了したら、[完了]をクリックします。プログラムでは、ブロックに対応するステップは、作成したブロックに置き換えられます。
他のブロックを使用するのと同じ方法で、プログラムでカスタムブロックを使用します。 複数のカスタムブロックを組み合わせて、プログラミングをさらに簡単にすることもできます。創造的であること-カスタムブロックは、それらを利用する場合に非常に役立ちます。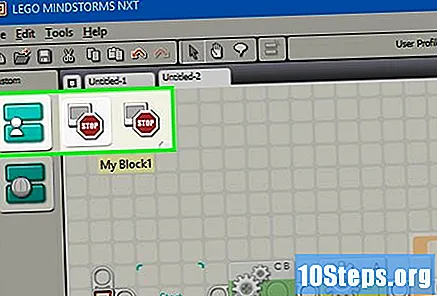
チップ
- 特にロボットでプログラミングを学ぶ最も簡単な方法は、テストすることです。特定の操作の内容を知りたい場合は、テストしてください!学んだことを書き留め、後でプログラムで使用します。
- プログラムを頻繁にテストして、期待どおりに機能することを確認します。
- ヘルプマニュアルを使用して、より複雑なブロックの使用方法の詳細と例について読むことを恐れないでください。


